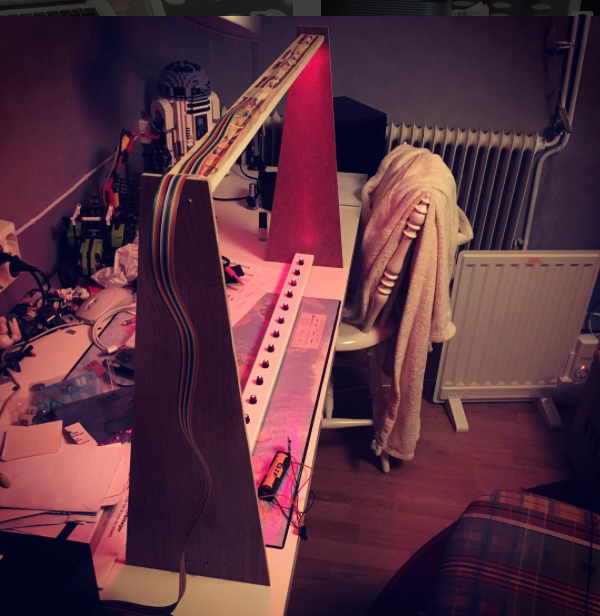
Frank Piesik built the ElektroCaster, an awesome open, modular guitar-synth.

The incredibly versatile ElektroSynth is playable as both an electric guitar and and synth, and also has a pretty impressive list of features such as:
- Parametric OpenScad modelling (changable string count, scale, space between strings,…)
- Fully controllable RGB-Led-iluminated Fretboard (Only the first 17 frets for now, but easily exendable)
- Touch-sensing-frets
- Long scale (700mm) for low tunings
- Two micros, one for audio an one for everything else.
- Per string signal path
- hexaphonic pickup
- hex-preamp
This project came about because Frank had always wanted an illuminated fret-board to display information such as scales and sequences. Armed with a 3D printer, CNC router and other maker tools, he set out to build a guitar from scratch.
The HackADay project page has some great information on the project as well as a detailed build log. This is an open source project with the code available on GitHub and design files available on Dropbox (a Dropbox login is required)