Jesse M put together a MIDI to DMX controller to provide an simple way to control a variety of lights with any software or hardware that can transmit MIDI.
This low cost, easy to build MIDI2DMX board makes it easy to sequence lights for live music performances. Jesse developed the board after discovering it was difficult to find good, well supported, inexpensive DMX controllers. The Teensy is programmed to be a USB MIDI device so it will show up in any MIDI capable software.
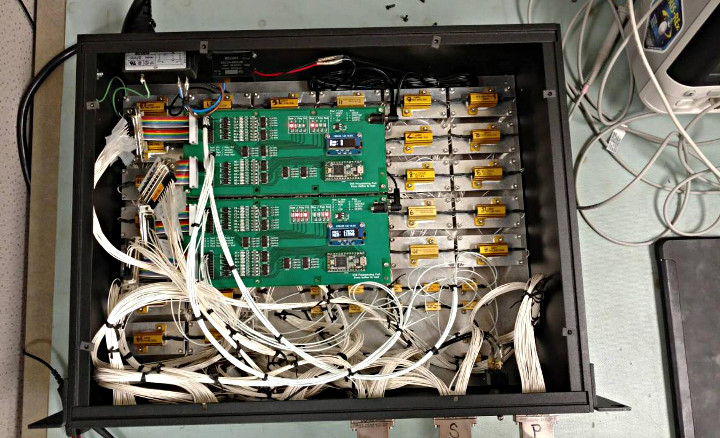
Ishkabbible (forum user) is part of a team of scientists is building a camera simulator that’s being used to validate commands that will be sent to the cameras on the OSIRIS-REx spacecraft.
The OSIRIS-REx spacecraft is traveling to Bennu, and asteroid that has a relatively high probability of hitting impacting the Earth in the 22nd century. The mission seeks to sample and study different aspects of the asteroid. The team is working on the OSIRIS-REx Camera Suite (OSCAMS), one of the five sets of instruments that will be used to explore Bennu. A Teensy 3.2 replaced an underpowered PIC processor in the camera simulator and is simulating the mechanical portion of the cameras.
More information on the mission can be found here.
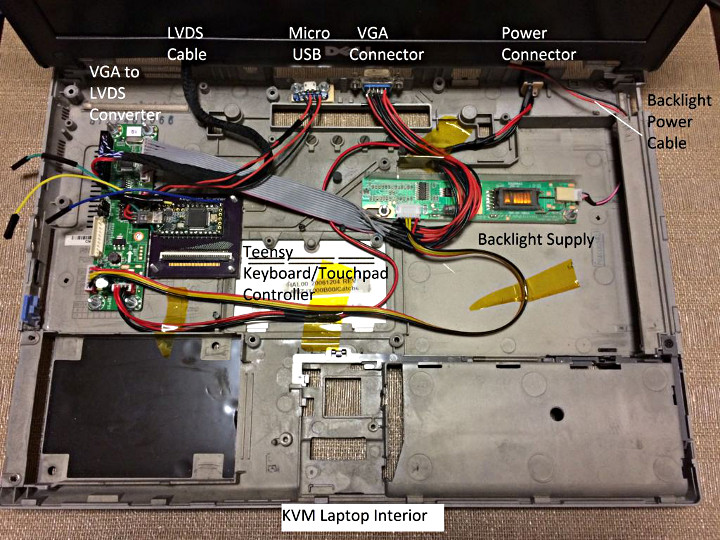
Frank Adams used a Teensy to turn an old laptop into a server crash cart.
A popular tool in many server farms, a KVM (Keyboard, Video display, Mouse) or “crash cart” is a diagnostic tool you can wheel up and plug into a crashed rack mount server to figure out what went wrong. Frank converted an old, broken laptop into a KVM by replacing the motherboard with a Teensy and a video converter card.
Ben Krasnow of Applied Science reverse engineered an electron microscope to add image capture using a Teensy-LC.
The image capture system allows Ben to connect a computer to the electron microscope and capture images directly.
He started with analog video signal that the SEM (scanning electron microscope) is outputting and digitized it using a Teensy-LC to send the digital values over USB to the computer. On the computer a Processing.org script displays the image in real time and optionally saves the frames.
The microscope doesn’t have a port to capture an analog video signal, so by probing around on the circuit board along with the schematic, Ben was able to find a signal that would work.
He used opamps to translate the -12V to 12V signal to a zero to 3.3V signal, and also extract the video sync pulse. After searching around around he found that using the programmable delay block (PDB) is recommended for projects like this. This seemed like the way to go until it was discovered that he had a Teensy-LC on the shelf which doesn’t have a PDB. When he started coding he had a challenge on his hands to made the signal processing code work without the PDB. He ended up using interrupts, which proved to be challenging. Interrupts can’t be trusted for accurate timing because there could be an undetermined delay when the interrupt fires leading to variable timing. Playing with interrupt priorities and writing the code as efficiently as he could he was able to get consistent timing for 142 kHz sampling.
It’s well worth the time to watch the full YouTube video. Ben does a great job explaining how he accomplished this project. Ben has a link to his source code in the video’s description.
Ben Schwartz combined his passion for building electric skateboards with some NeoPixels to make an illuminated ride.
While Ben had experience building electric skateboards, he didn’t have a lot of experience with coding for NeoPixels. He started off using an Aurduino Uno and modified the NeoPixel tutorial by Alex Glow. He moved to the Teensy 3.2 because the compact size made it easier to fit into his project. A 24V to 5V buck converter was used to power the Teensy and NeoPixels from the skateboard battery.
To finish up the project Ben made a 3D-printed enclosure to waterproof the electronics.
Code, schematics, and the 3-D printing plans can all be found on the Hackster.io project page.
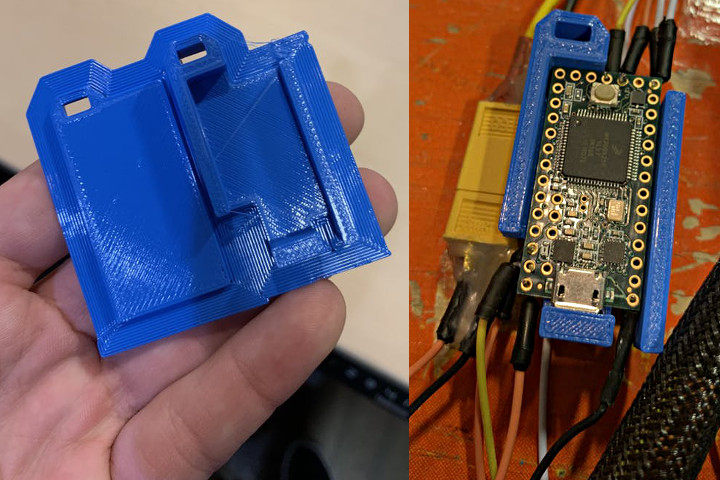
Simon Restrepo upgraded his bicycle helmet with a nifty safety improvement, LED turn signals.
After a close call with a bus while riding his bike one night, Simon wanted to improve his visability while riding his bike. He had a Teensy 3.2 handy and decided to add LED turn signals to his bike helmet.
The turn signals are pretty easy to put together. The Teensy fits into a tictac box to protect it and the project is powered up by a small power bank. The turn signals are activated by a couple of push buttons – one for left and the other for right.
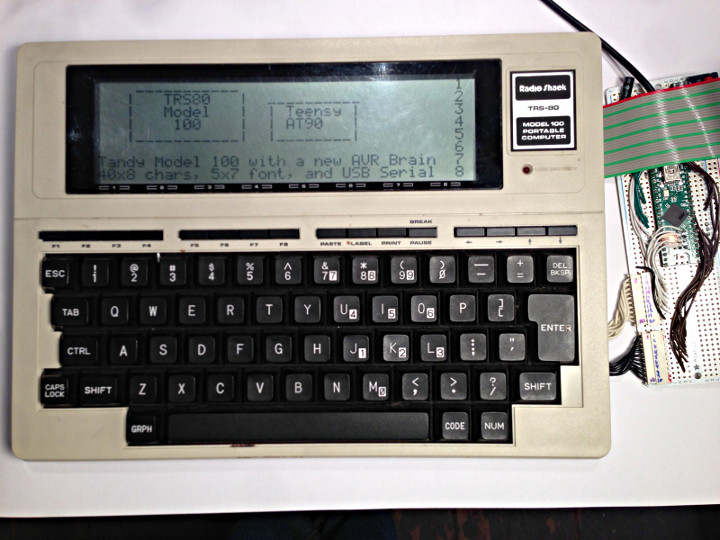
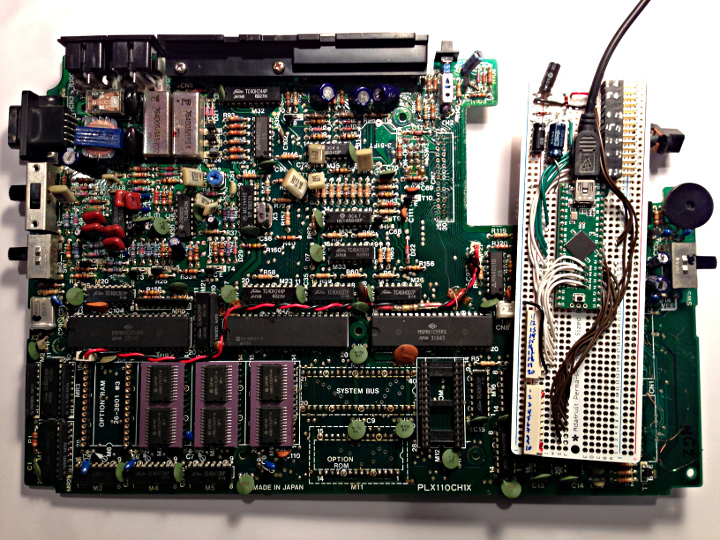
The TRS-80 Model 100 was introduced in 1983 and was one of the first notebook-style computers. It features an 8-bit processor and 32k of RAM. Trammel Hudson came across one of these and while it’s motherboard had failed, the LCD and keyboard were still working. He decided to take this non-working model and give a new brain. The original, bulky motherboard (check out all those through hole parts) was replaced with a Teensy ++ 2.0
There was a bit of a challenge with making the original LCD and keyboard work with the Teensy. He first identified how the LCD drivers worked and wrote libraries to replace them. The LCD did not have a character generator, so a font set had to be created.
Check out this project page for details on how it came together.
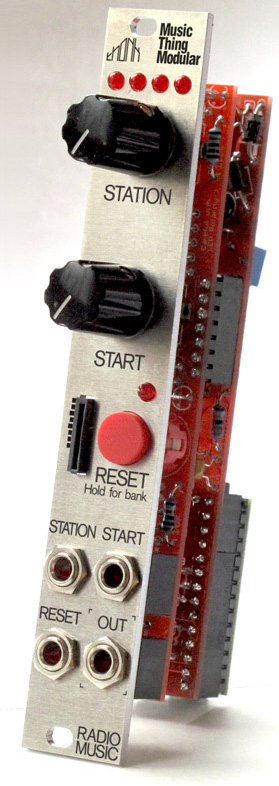
Tom Whitwell of Music Thing Modular created Radio Music, a DIY virtual radio module.
Radio Music is not a radio. It is a eurorack module sample player that behaves like a radio and is designed to be a source of unexpected audio.
This module works on a series of banks and stations, just like a radio. It uses a Teensy 3.2 to play files from an SD card to simulate a voltage controlled AM/FM/Shortwave/Time Travel radio.
This module is extremely versatile and can be turned into a different module simply by changing the firmware. The Chord Organ firmware that synthesizes chords.
Radio Music is open hardware with extensive documentation available on GitHub.
To learn more about Radio Music, check out this great 5-part series from Voltage Control Lab that covers topics such as preparing samples and alternative firmware.
You can purchase a Radio Music DIY kit from Thonk. It includes all the parts needed to build your own. The kit features maker-friendly though hole parts. Here’s a time lapse video of the assembly
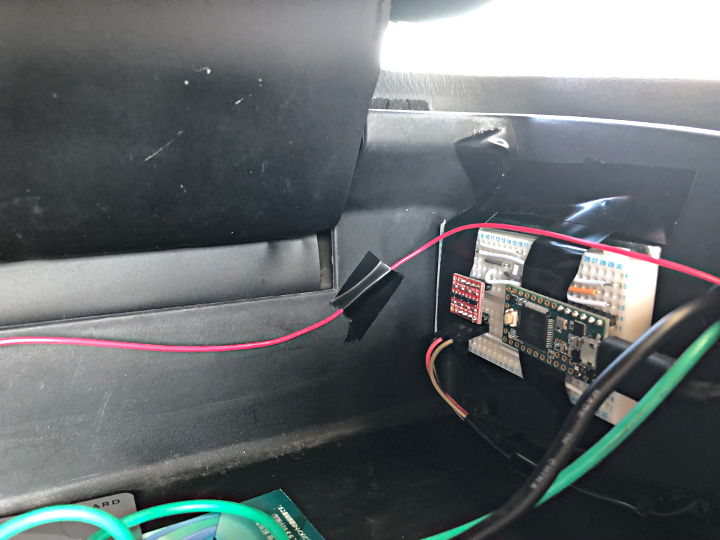
The ’97 Impreza uses an engine control unit (ECU) and provides a diagnostic connector for external communication. P1ckachu built a diagnostic interface device, got a dump of the ECU’s firmware, and reverse engineered the binary to figure out how to disable the speed limiter. The custom interface uses a Teensy 3.2 and logic level converter to convert the Teensy’s 3.3v to the car’s 5v.
P1kachu has a great write up the project on this page.
alpage built a large keyboard to be played while doing a handstand.
When his handstand coach asked if anyone could build a piano that could be played with his feet while upside down, alpage stepped up to the task. Using a Teensy 3.5 and wave table synthesis in the Audio Library, the piano came together. The piano plays chords and has 4 different voices.
You can watch the keyboard being played with feet while in a handstand in this Facebook video.