Carson Kompon has made a super fun DIY game controller project: a wearable that turns his head into a joystick.

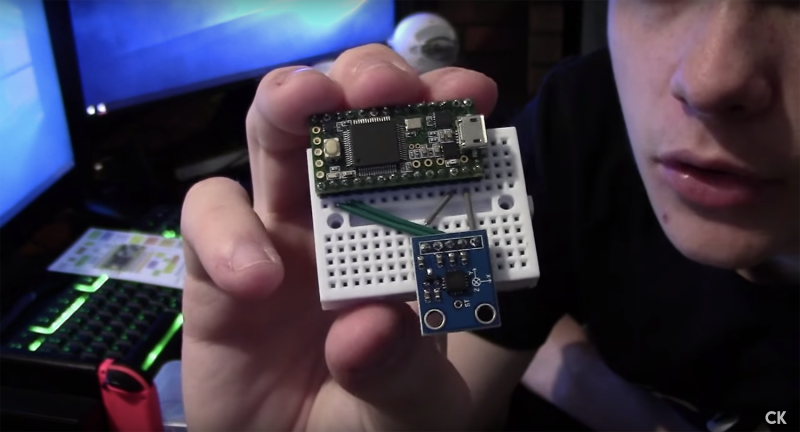
Carson Kompon is a gamer who likes to make his own game controllers. For his first experiment with a motion sensor, he decided to attach a Teensy 3.2 and an accelerator onto a hat, turning his head into a joystick. The hat joystick doesn’t prove to be the most effective way of playing but this project gets major points for creativity and fun.
In the video above, he takes us through his project build in detail and demonstrates it working with Tower Unite and Stealthscape, a game he’s been working on that will hit the STEAM store later in 2020. If you want to recreate this project Carson has helpfully published his code and shared his schematic. You can also take a look at Carson’s YouTube channel for more gaming fun.