LED and pixel art have become ubiquitous, but have you ever thought about how difficult something like this would have been to achieve in 1973? Andrew Seawright has, as a necessity of recreating his father James Seawright’s Network IV sculpture.
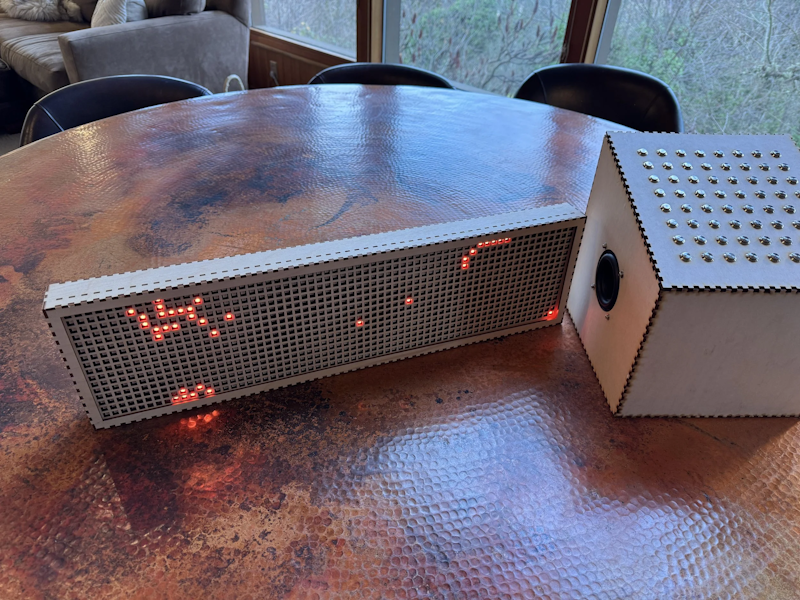
The original was installed in Concourse B of the Seattle-Tacoma Airport, and used 1024 GE R6A neon glow lamps. It was controlled by a Data General Nova 1210 minicomputer and featured three Moog-style analog synthesizers. Instead of recreating the piece with modern code, Andrew emulated the Nova on a Raspberry Pi 4B, then ran the original code, extracted from paper tape. A Teensy 4.0 using the OctoWS2811 library controls LEDs in place of the original lamps, replacing the GPIO peripheral of the original. A second Teensy emulates the analogue sounds and handles inputs from a miniature version of the original’s 8×8 button matrix. Source code (original and “rebooted”!) is available on GitHub, and videos of both the original and modern incarnation can be enjoyed below.