It’s well known long APA102 LEDs strips have have trouble at 24 MHz, usually after 150 to 250 LEDs. But why? Here’s my attempt to investigate.
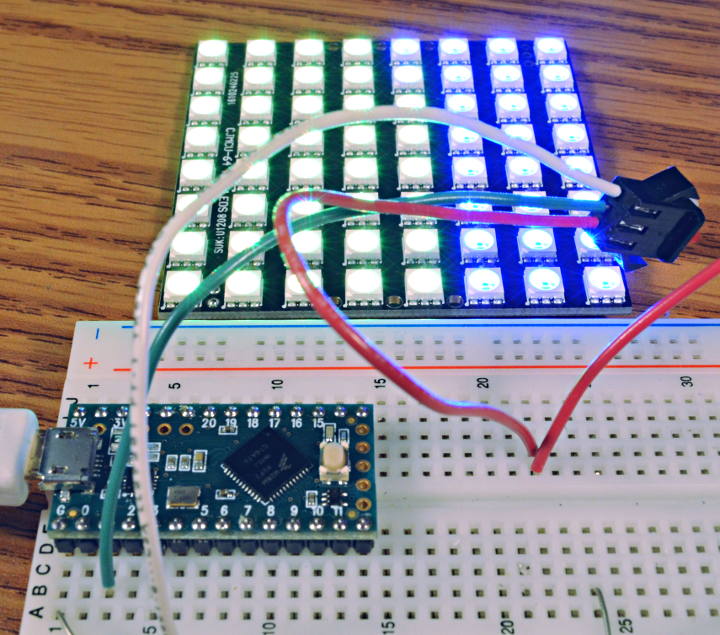
One tempting explanation is signal quality problems due to horribly messy unterminated wiring carrying high speed signals, as in this photo! But it turned out to be a more fundamental timing problem.
In this test, a Teensy 3.2 runs the FastLED “Cylon” example with this line:
NUM_LEDs was set to 160, and I connected a strip of 144. The oscilloscope traces are the signals which arrive at the end of the 144 LED strip.
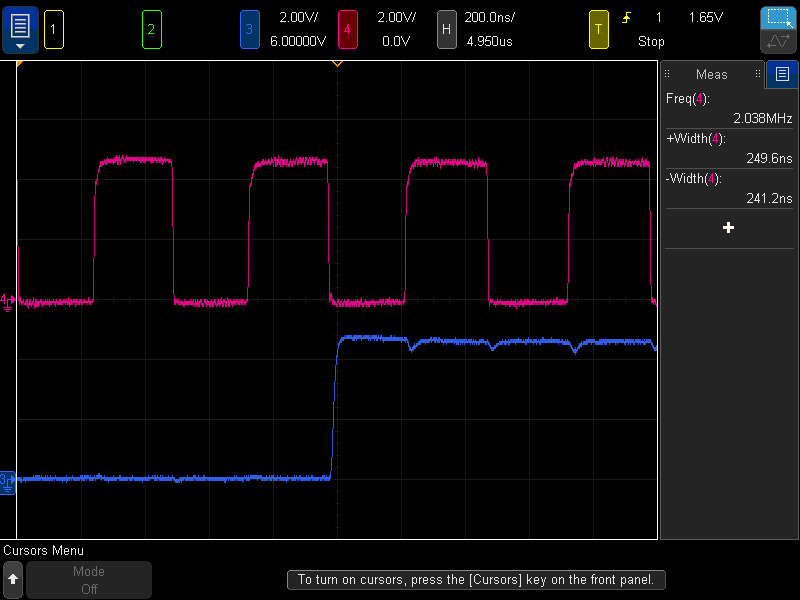
First, I set the clock speed to only 2 MHz to see the “normal” waveforms output by the last APA102 LED.
The main thing to observe here is the APA102 output changes its data line (blue) at the falling edge of the clock (red). You might notice a slight delay from the falling edge of the clock to the change in data, but it’s tiny relative to the slow 2 MHz clock cycle.
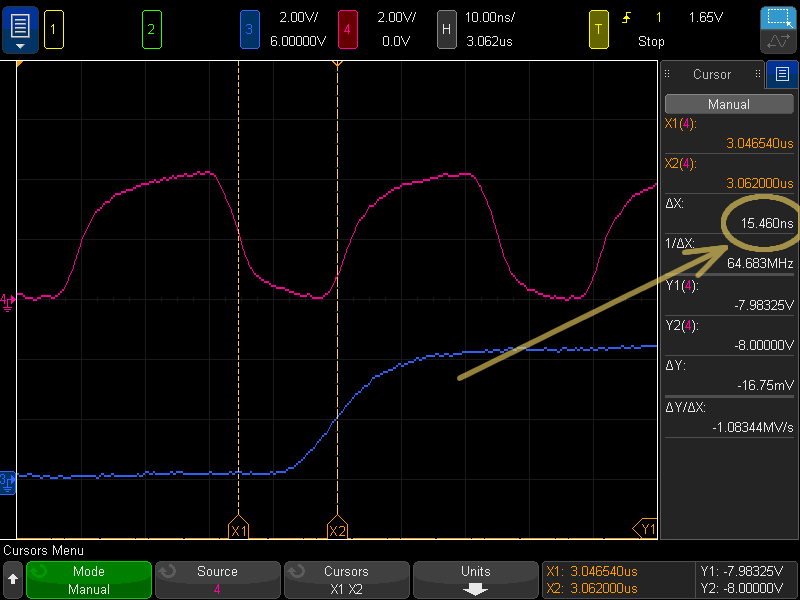
At 24 MHz, the delay is much more significant. In this case I measured approximately 15 ns delay from clock to the data changing.
You might also notice the red trace doesn’t look like the 50% duty cycle SPI clock signal. I believe this, together with the data delay, is the main cause of APA102 issues on long LED strips.
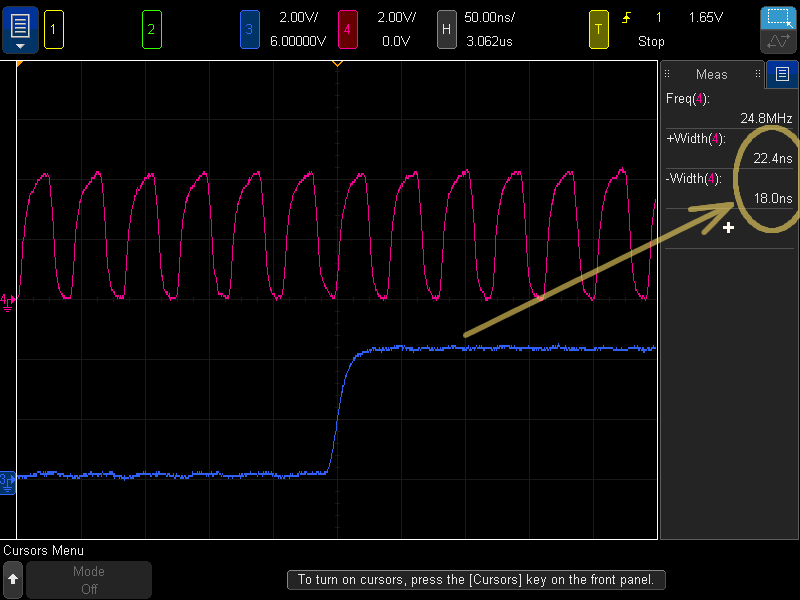
Here’s another measurement of the clock.
Each APA102 LED is supposed to regenerate the clock signal. Ideally this is supposed to allow a very long LED strip. But it appears each APA102 lengthens the clock high time and shortens the clock low time slightly. This might be internal to the APA102 control chip, or it could be simply due to the clock output driver having a faster fall time than rise time, causing the following APA102 to receive a slightly different clock high time. Perhaps the APA102 controller chip has a better N-channel transistor for pulling the clock output low than the P-channel transistor for driving it high?
After 144 LEDs, the clock low time on this strip has shrunk from 20.83 ns to approximately 18 ns.
With the data output delayed 15 ns after the falling edge, this leaves only 3 ns before the next APA102 LED captures the data on the rising edge of the clock. As the strip gets longer, each APA102 reduces the clock low time, until it’s shorter than the clock to data delay.
FastLED defaults to 12 MHz SPI clock for APA102 LEDs on Teensy 3.x, which should allow for several hundred LEDs before this clock duty cycle change becomes a problem.
This test was just one APA102 strip I purchased about a year ago. The Chinese semiconductor manufacturers making these LEDs have a history of changing the silicon without any notice. I also only tested at room temperature, using only 1 example program which doesn’t drive the LEDs anywhere near 100% duty cycle (more heating). I powered the 144 LEDs with 5V from both ends, but didn’t make any measurements of the voltage near the middle of the strip. Power supply voltage might matter. In other words, your mileage may vary.
But hopefully this helps with understanding what’s really going on, why short APA102 LED strips work so well with the fast clock speeds, but fail when using very long strips, even though the LEDs are supposed to regenerate the clock and data as they pass it down the strip.
A question was recently asked on the forum, how fast can attachInterrupt count pulses. I did some testing to find out, and made this video.
Turns out Teensy 3.2 can run about 1.25 million interrupts per second. Teensy 3.6 can do about 2.55 million per second. But these depend on assigning a top priority to the interrupt, as explained in the video.
Of course, both boards can use a timer to count pulses at very high rates, at least 30 MHz.
A common problem with WS2812 / NeoPixel LEDs is creating their control signal with precise timing conflicts with other timing-sensitive software. Adafruit NeoPixel completely blocks all interrupts. FastLED can be configured to allow other interrupts, but any other library using interrupts for more than several microseconds can disrupt the WS2812 signal.
OctoWS2811 has offered non-blocking performance on Teensy 3.x since early 2013. But it consumes 8 pins and places restrictions on 1 or 2 others, which makes it difficult to use in many projects needing some of those pins. OctoWS2811 is designed for large LED projects (500 to 6000 LEDs), which is “overkill” for many projects using only dozes or even a few hundred LEDs.
Especially for projects using NeoPixel products with the Teensy Audio Library, or trying to receiving incoming serial data (especially DMX lighting control), we have long needed a simple, single-pin, easy-to-use library that doesn’t interfere with interrupts. For a long time I’ve meant to write this library, and this recent forum conversaton finally gave me the push to get it working to truly solve the NeoPixels+Audio isssue!
Inverted Serial Transmit
WS2812Serial uses one of the hardware serial ports to actually transmit the Ws2812 data. This idea certainly isn’t new. This message is the oldest reference I could find of the basic idea.
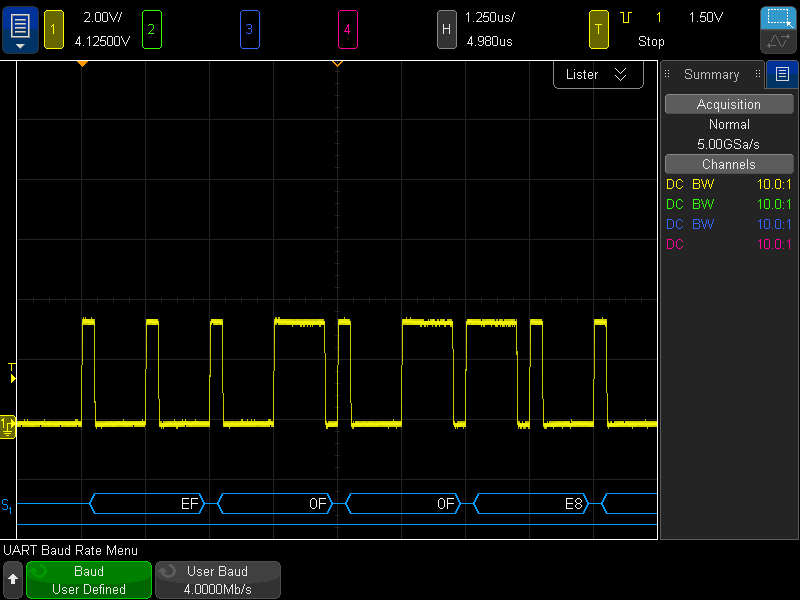
The serial port is configured to run at 4 Mbit/sec, which is exactly 5 times the 800 kbit/sec speed WS2812 LEDs expect. Every 5 data bits becomes one cycle of the WS2812 signal.
Standard 8N1 format serial sends 1 start bit, 8 data bits in least-significant-bit-first order, and then 1 stop bit. In this case, the signal is inverted from the usual TTL level output. Teensy LC & 3.x have hardware built in to invert the signal.
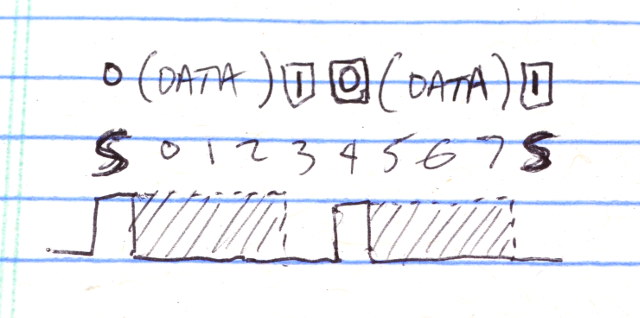
Since the start bit is always high, to send a zero bit to WS2812 the first 4 data bits are configured low. To send a one bit, the first 3 are configured high and the 4th low. The other half of the byte becomes the next WS2812 bit. Bit 4 must always be high, and bits 5 to 7 control the data seen by WS2812. The stop bit is always low, which automatically completes the 2nd WS2812 data.
Originally I tried using only 3 bits per WS2812 time slot, with 2.4 Mbit/sec serial baud rate. Many of the WS2812 datasheets say the timing allows up to 450 ns pulse width, so in theory this 417 ns pulse should work. In practice it did work with some WS2812 LEDs, but not others. In the end, I changed to 4 Mbit/sec which allows it to work with all WS2812 / NeoPixel LEDs.
Direct Memory Access (DMA)
To achieve non-blocking performance, and to run efficiently at 4 Mbit/sec baud rate, DMA is used to copy the data directly from memory to the serial port.
The result is a perfectly continuous WS2812 output which does not require any interrupts and leaves the processor free to run other libraries or your program to compute the next frame of LED data.
The need to compute all of the serial data before each update does lead to the one major drawback of this non-blocking approach: memory usage. Normally with FastLED or Adafruit NeoPixel, only 3 bytes of memory are used per LED. WS2812Serial requires 15 bytes, the normal 3 for drawing, and 12 for composing the serial data.
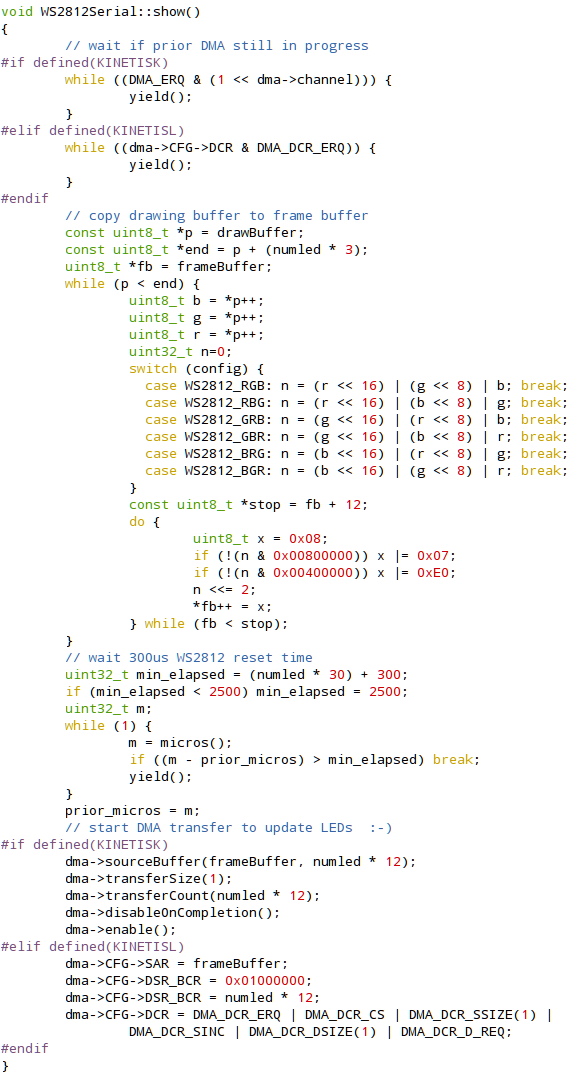
Fortunately the code is fairly simple. Here is the entire show() function which updates the LEDs. In the middle you can see “x = 0x08” which sets the begin bit for the 2nd half of each byte’s WS2812 output, and then the two logical OR operations which control the groups of 3 bits which are the shaded portion of the drawing above.
In this code sample you can also see my DMAChannel.h abstraction layer for DMA transfers. It is my attempt to make DMA simple to use, like other Arduino libraries. Obviously things are not quite there yet, especially for Teensy LC where you can see I had to resort to directly programming the DMA controller registers, rather than using the functions to configure the source, destination, transfer size and count.
At some point I intend to write a detailed article about how DMA works. Mike from Hackaday has been asking me to do this for years! If you’d also like to see it, remind me too….
One other possible idea for this library might involve using two DMA channels and their interrupts, to allow a smaller serial buffer. The basic idea would involve rendering only part of the output, and configuring each DMA channel to send half. Each each completes and generates an interrupt, another chunk of the output could be generated and the just-finished DMA channel could be quickly reconfigured to send the next chunk. Ideally, this could allow a relatively small memory buffer. It would require interrupts, but if they are delayed by other libraries or code, hopefully a user could make a trade-off between memory usage and allowable interrupt latency.
For now, WS2812Serial simply requires a big frame buffer and gives completely non-blocking performance. No interrupts are ever used. That does consume extra RAM, but the huge benefit is compatibility with other code or libraries require interrupts or CPU time while the LEDs update.
I recently built flame sensing electronics for Martin “Moltensteelman” Montesano’s “Three Wishes” art project to be shown at Burning Man.
As a safety precaution, certain types of fire art installations are required to use sensors on their pilot lights. If wind blows out the pilot, the gas must automatically turn off and other valves controlling high pressure propane directed at that pilot must be prevented from opening.
In this article, I’d like to share with you details of how I built a circuit board for Martin’s project to meet these requirements.
Safety First Disclaimer First
This Information (web page and related hardware and software files) are provided “as is” and without warranty of any kind, expressed or implied, including but not limited to the implied warranties of merchantability and fitness for a particular purpose. In no event shall PJRC.COM, LLC or Paul Stoffregen be liable for any direct, indirect, incidental, special, exemplary, or consequential damages arising in any way out of the use of this Information, even if advised of the possibility of such damage.
My hope is you’ll find this article interesting. If you do make use of it, remember it’s something you found for free on the Internet. Ultimately it’s your responsibility to manage and accept responsibility for the risks of any project you build.
How To Sense A Flame
There are at least 3 ways to sense fire.
Infrared Light: If you search for flame sensors and Arduino, nearly all tutorials and inexpensive products use a simple IR diode or photo-transistor circuit. Infrared light also comes from many other natural and man-made sources, making this approach very difficult to implement reliably. The absolute last thing you want in this application is a false reading allowing high pressure propane to flow!
Heat / Temperature: Thermocouples and Thermopiles are commonly used in water heaters and gas fireplaces. However, temperature sensing can be quite a challenge for an outdoor application exposed to wind and made with metals that can remain hot for quite some time.
Conductivity / Flame Rectification: Modern gas furnaces use this highly reliable technique. Gas flames are conductive and act as a rectifier, similar to a diode. The rectification effect is supposed to be due to a difference in the mobility of the positive ionized particles (burning fuel) and free electrons. Applying a voltage to the flame can move the electrons much moreso than the positively charged ions. The best explanation I’ve found is in this paper by Andreas Möllberg.
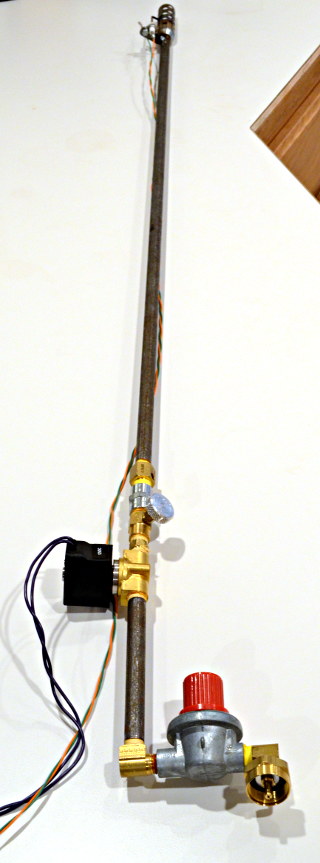
Martin had already purchased this flame sensor rod (Rheem 62-23543-01), based on the fact that it’s the sensor used in a common furnace, that it has a convenient L-shape which works nicely for his art’s pilot light design, and that it’s only $7. So the path of flame rectification sensing was chosen…
He also rigged up 1 of the Three Wishes pilot lights to a regulator and fitting so I could run in in by back yard from my barbeque’s propane tank!
With this sensor and test gear, I started on electronics to make it actually work.
Flame Rectification Circuitry
I must confess, before this project I had never even heard of flame rectification. Reading Möllberg’s paper, it was clear the flame acts like a diode with a very high value resistor in series. Many guides exist for training furnace technicians with good info. So the basic idea is to apply a substantial AC voltage to the flame and then look for a tiny pulsed DC current.
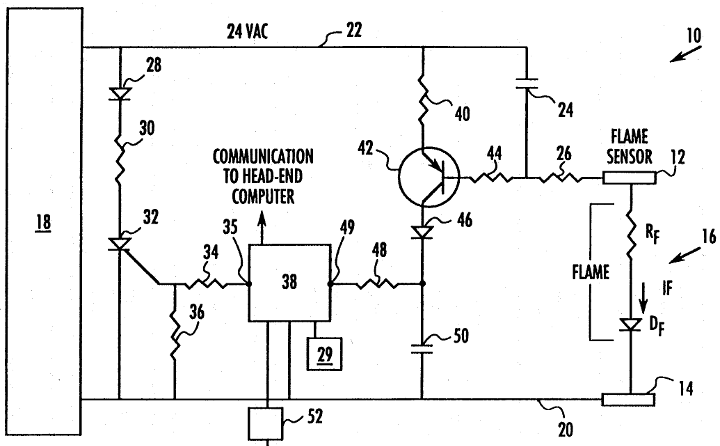
After a couple false starts, a little more searching turned up several patents. I tried a couple of these, ultimately settling on US5439374, partly because it allows an actual analog reading (many circuits are just flame vs no-flame indicators), and partly because it expired in 2013.
US5439374’s basic idea is current can only take 2 paths to get to the flame, either through capacitor #24, or through the resistors and transistor. Since capacitors can only pass AC current, if any net DC current flows through the flame, it must also flow through the transistor’s base-emitter junction.
An amplified copy of the DC current flows through the transistor and diode, causing capacitor #50 to charge up. Higher DC flame conduction causes this capacitor to charge up faster.
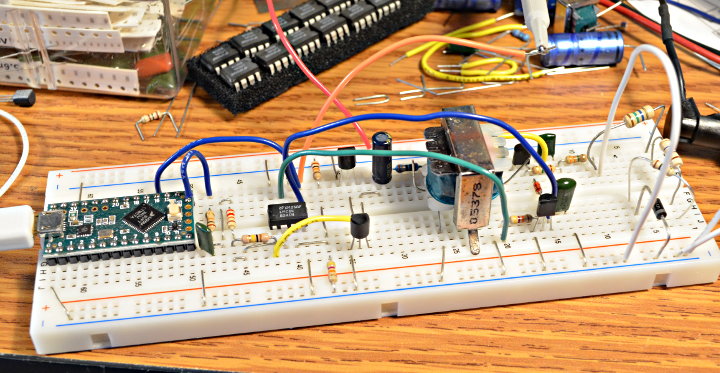
I built an adaptation of the US5439374 circuit on a breadboard.
Much of this circuitry generates the AC voltage, because it’s meant to run on 12 volts DC. From left to right, a Teensy LC creates a AC waveform using its DAC output. It goes through a low-pass filter to smooth the stairstep edges, and an amplifier with gain of 3 to turn it into a 10 volt peak-to-peak waveform. The amplifier uses a pair of transistors to buffer its output, which then drives a small transformer with approximately an 1:11 ratio. The result is about 40 volts AC (rms), or about 112 volts peak-to-peak. Rather than use 50 or 60 Hz as in a furnace, the Teensy generates 1kHz AC, which allows for faster sensing and a smaller transformer and capacitors.
The parts in the upper right area of the breadboard are the US5439374 circuit. I used a 2N5087 transistor and after some fiddling settled 1nF & 10nF capacitors. On the far right side are 15M, 10M, 10M resistors and a diode meant to simulate the flame. As you can image, I tried many combinations of these, and in this photo a wire is testing what happens when the output shorts to ground. It turns out the US5439374 circuit works extremely well, able to measure diode plus 35M ohm resistance quite well.
I added one more NPN transistor across the capacitor, which you can see just to the bottom right of the transformer. The other half of the dual opamp chip turns on this transistor if the capacitor’s voltage rises above 3.3V. It turns out this circuit can gradually charge the capacitor to about 20 volts, so this protects the Teensy’s analog input pin, in case the code isn’t running and regularly discharging the capacitor before it can accumulate too much voltage.
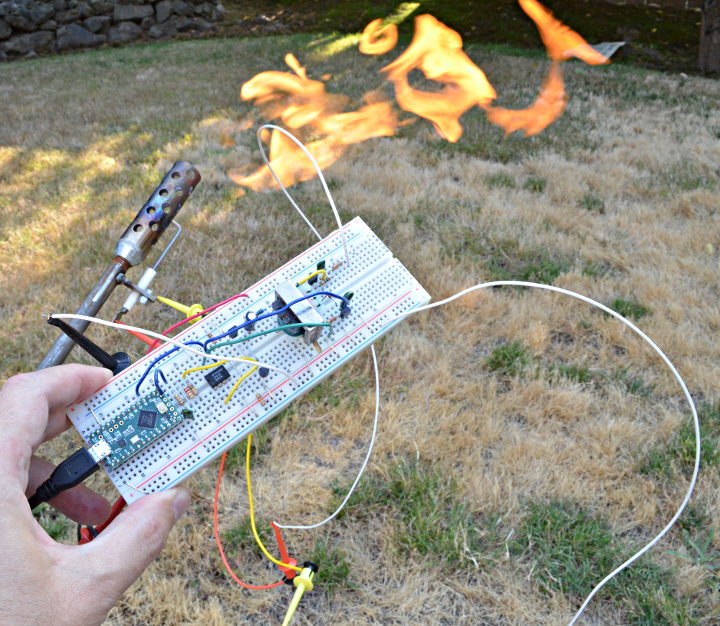
First Test With Fire
No amount of testing with resistors and diodes could really satisfy my lingering doubt. Would this would really work with actual fire? So it was time to run a first test with the breadboard circuit connected to a real flame.
Martin came over and we ran it for the first time with real fire. The Teensy had just a simple program measuring the elapsed microseconds for the capacitor to charge to 2 volts.
I’m happy to say the flame gave a really strong signal. I had done a lot of testing with 10M to 35M resistors. Even with the gas turned down very low, with the flame just barely flickering, we got readings (low numbers) printing in the serial monitor.
With the circuit working, it was time to turn it into a usable design to control the pilot light and other valves.
Circuit Board
I quickly designed a circuit board with the flame sensing circuit, a power mosfet for controlling the pilot light gas valve, a relay to enable the other valves, a special timer circuit I’ll describe in more detail in the next section, and all the usual power input conditioning you’d expect.
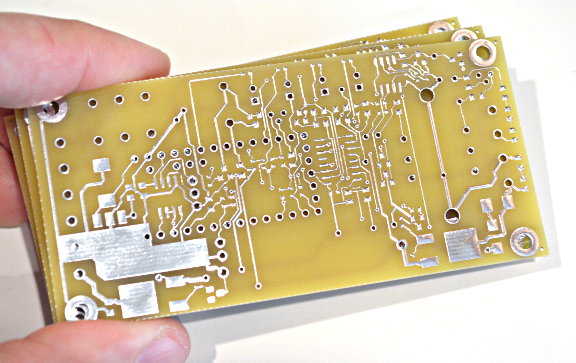
Since time was running short, I ordered boards from Sunstone Circuits. They have a very rapid service. The quick turn prices are better if you choose the option for no solder mask or silk screen. I put the order in for these boards on Wednesday for a 2-day turn. Sunstone shipped 1 day early, so I actually got these on Friday! Thanks Sunstone. 🙂
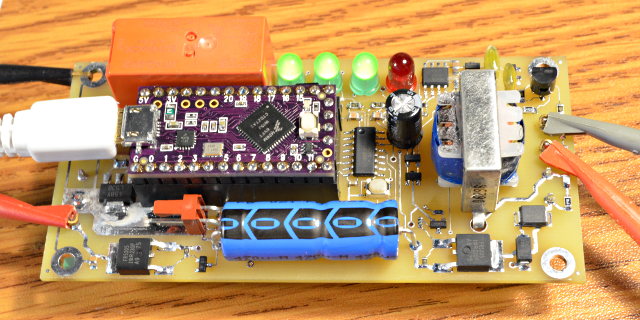
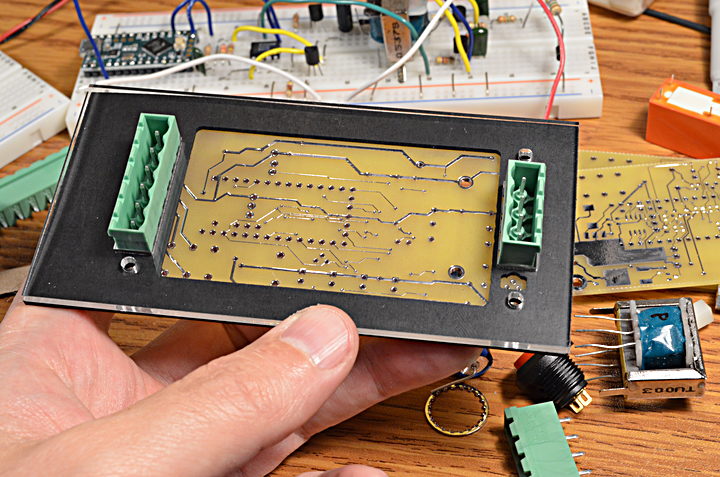
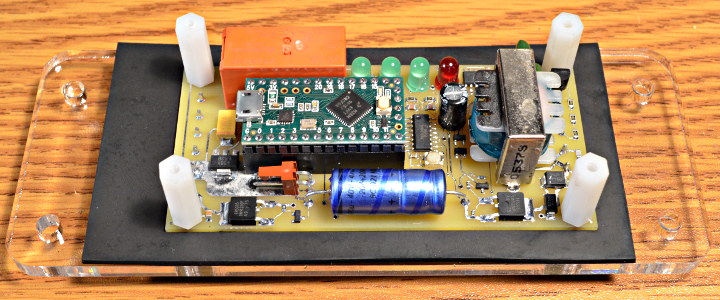
This was the first board I built. As you can see, it has a smaller transformer. I only had 4 of the larger, better transformers, so I wanted to try this one first.
Luckily, the board worked. No major mistakes. However, during testing I did discover one small oversight. The B130 clamping diode has a small leakage current. It’s nowhere near enough to turn on a solenoid, but it does make the output measure about 10 volts with a multimeter (having about 10M input impedance). On the final boards I added a 4.7K resistor, so the output is nearly zero volts when off. The rest of the info in this section has this extra 4.7K resistor added.
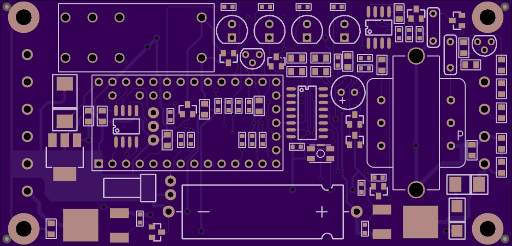
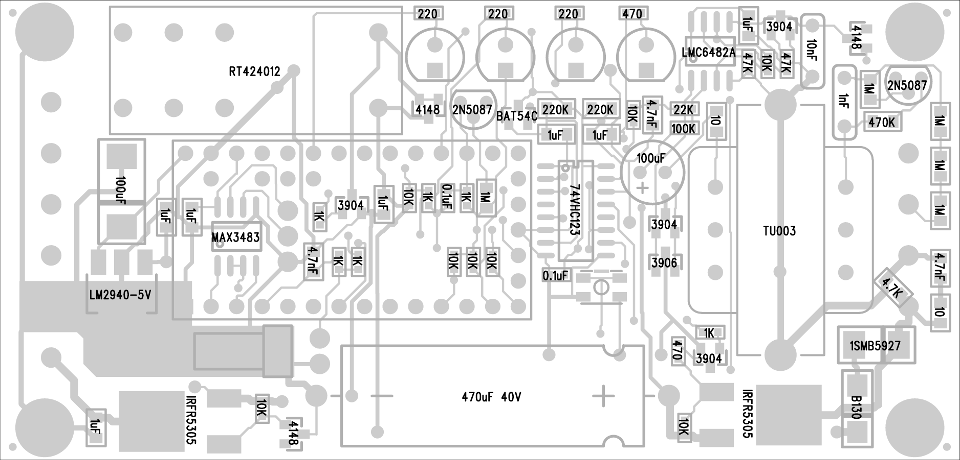
Here is the parts placement diagram for building the board.
When bringing up this board for the first time, there’s quite a lot of hardware to test. First, I applied 12V power without a Teensy installed, only to check the 5V power. If something is wrong with the power input, discovering it early can save the Teensy and most of the other circuitry.
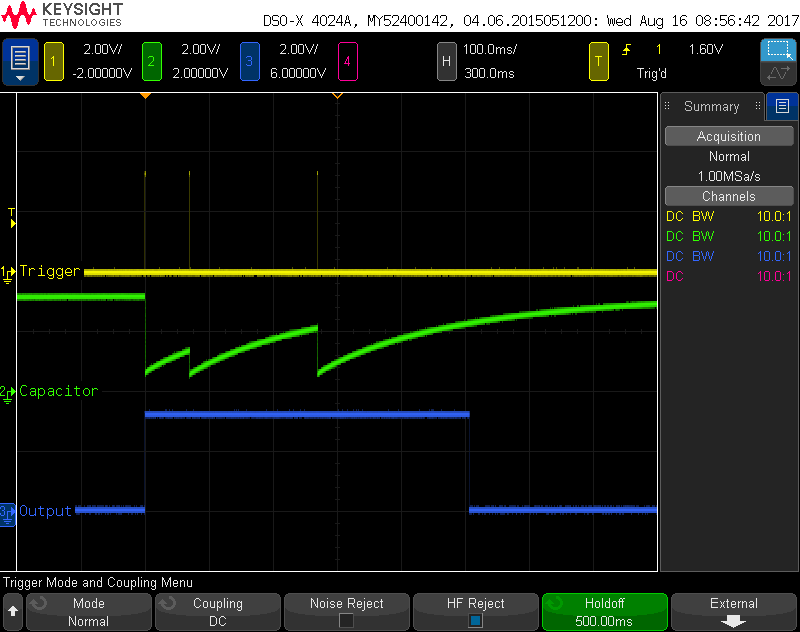
I created this hardware test sketch to help verify most of the board’s hardware. While running, the gas solenoid output turns on for 1/2 second and then off for 1 second. It’s best to check the timing with a logic analyzer or oscilloscope, but if the timer circuity isn’t working the likely failures are no changes or 3 rapid pulses every 1.5 seconds.
Holding the pushbutton changes the output to the relay, to allow testing the other timer, the relay & its transistor, and of course the pushbutton.
The test program also generates a 1.2 volt AC waveform (3.3 volts peak-to-peak) at Teensy LC’s DAC pin. The opamp circuitry is supposed to increase it to 3.6 volts AC (10.3 volts peak-to-peak) at the transformer input. The transformer should step it up to approximately 40 volts AC (112 volts peak-to-peak on an oscilloscope). When testing these voltages, oscilloscope probes should be in 10X mode.
The final test to check the US5439374 flame sensor circuit was done with the board programmed with the final code. It prints the flame measurement to the Arduino Serial Monitor. Testing is pretty easy to do with resistors and diodes. A fast non-Schottky diode is best. I used a UF1003-T diode. Smaller numbers are stronger signal levels. The circuit should be able to measure at least 25M in series with the diode, but without the diode it should see no signal (highest number printed).
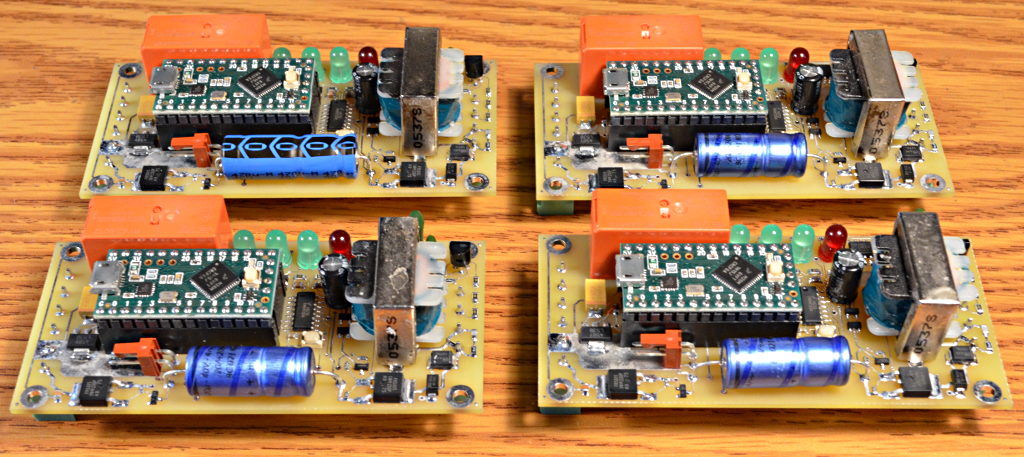
Building and testing these boards took most of a weekend. Here’s the final 4 boards.
Safety Features
The primary safety feature in Martin’s project is use of normally closed solenoid valves and plumbing rated for high pressure propane. All failure modes need to avoid keeping power applied to the solenoid valves. When the valves are off, the propane is contained.
Rather than allowing the Teensy pins to directly control voltage to the valves, I added hardware timers using a 74VHC123 chip. This part works essentially the same way as the familiar 555 timer chip, with voltage comparators and set-reset latches. But unlike the 555, it is designed to be retriggerable and it has logic for true edge triggering. These can be added to a 555 with extra parts, but each adds design compromises. The 74VHC123 gives both features in a highly reliable chip.
The timer turns on its output when it sees the rising edge of a trigger pulse. The edge trigger is important. Microcontroller failure modes tend to result in the pins stuck in one state. The timer does not respond to its input stuck high or low. Only the low-to-high transition begins the timing cycle.
This oscilloscope screenshot shows the waveforms when running the hardware test program. The timer keeps it output high for 0.25 seconds following any rising edge trigger. The test gives 3 pulses, then waits. The waveform after this 3rd pulse tests a failure where Teensy might crash or lock up or otherwise fail. The hardware timer automatically turns off the propane solenoid valve after 0.25 seconds without another pulse.
The code Teensy runs also implements extra safety features. The main one is a count of good flame readings. Pulses are only sent to the timer if the previous 4 sensor readings all show a flame signal. While the US5439374 circuit works very reliably, this extra check is meant to have the gas turn off in the case where only intermittent measurements are made. Only when a consistent pattern of good flame readings are seen can the timers be triggered to turn on the outputs.
The code also measures the time while the manual start button is pressed. If this button were to fail (in the pressed state), and the pilot light is out, we don’t want to turn on any gas. A 20 second time limit is used, and it’s initialized to 100 seconds at startup. The manual start only works if the button is first observed as not pressed, to reset this time limit, and then can only keep the gas turned on for 20 seconds. If some unexpected mechanical failure results in an object falling onto the button, the worst case scenario is 20 seconds of pilot light gas.
Dust Resistant Construction
Anyone who’s been to Burning Man knows of the extreme dust. So I started the enclosure design around this IP67 rated pushbutton, which has real threads & a nut (so many are the flimsy press-in type).
This button photo is from the Digikey page, and really, I’m a bit curious how they manage to get such a perfect photos with the parts all standing? Must be tricks real photographers know…
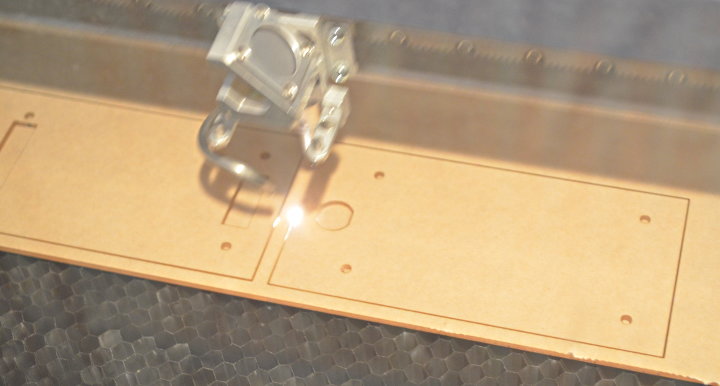
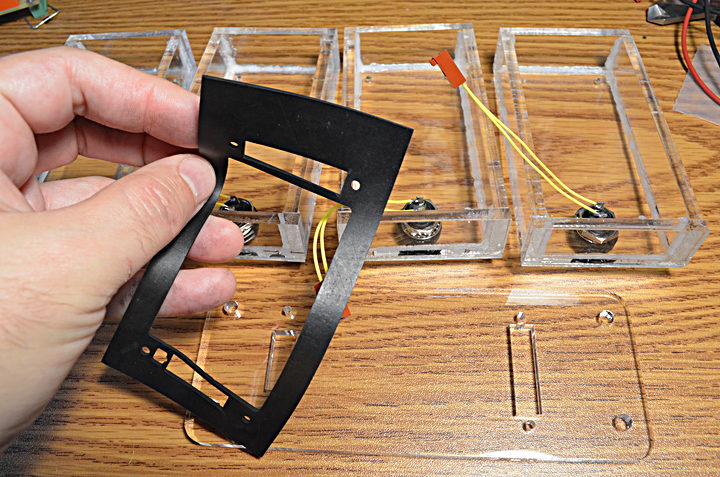
With the project coming together on a tight timeframe, I laser cut the enclosure from acrylic sheets I had on hand. Here is the lid made from thin material, due to the depth of the button’s threads.
Some time ago, I purchased samples of rubber material to someday try to make gaskets for a waterproof box. This was the day…
Again, a real photographer could have probably captured this without so much blur. Maybe I could have with a tripod? Maybe not? The camera has a lot of trouble focusing on a black sheet.
Here is a first fit check of the gasket against an early attempt at the base.
One of the many little lessons I learned is the squeezed rubber exerts force against the plastic, enough to make it bend with this thin piece. I ended up discarding this part and cutting bases from the thicker material to (hopefully) avoid gaps from the base bending.
The gasket seals the lid against the base, and the PCB against the base where the 2 connectors fit. For the lids, I just glued pieces together with normal acrylic cement and then used silicone caulking compound along the inside seams.
Here are the 4 completed lids with the buttons installed, and the final thicker base, ready to be assembled.
I’d like to remember this part of the project going smoothly, but the truth is I ended up making a few different base designs. Silly mistakes. Here’s the final fit check.
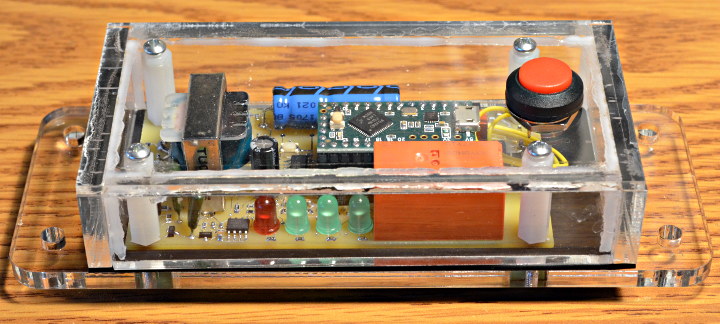
One other imporant piece was the height of these standoffs. The side walls are made to be about 0.015 inch taller than the combined standoff+PCB height, so there’s a slight squeeze applied to the rubber gasket.
Here’s the final assembly with the screws. It stands off the table slightly, since the connectors protrude from the bottom. Maybe not the most conventional design, but this was done pretty quickly.
One thing I considered but didn’t do was buy special sealing machine screws. Hopefully the ordinary screws will work. I guess we’ll soon know if this design resists the Playa dust of Burning Man, though Martin will probably also end up installing these inside a box that offers another layer of protection.
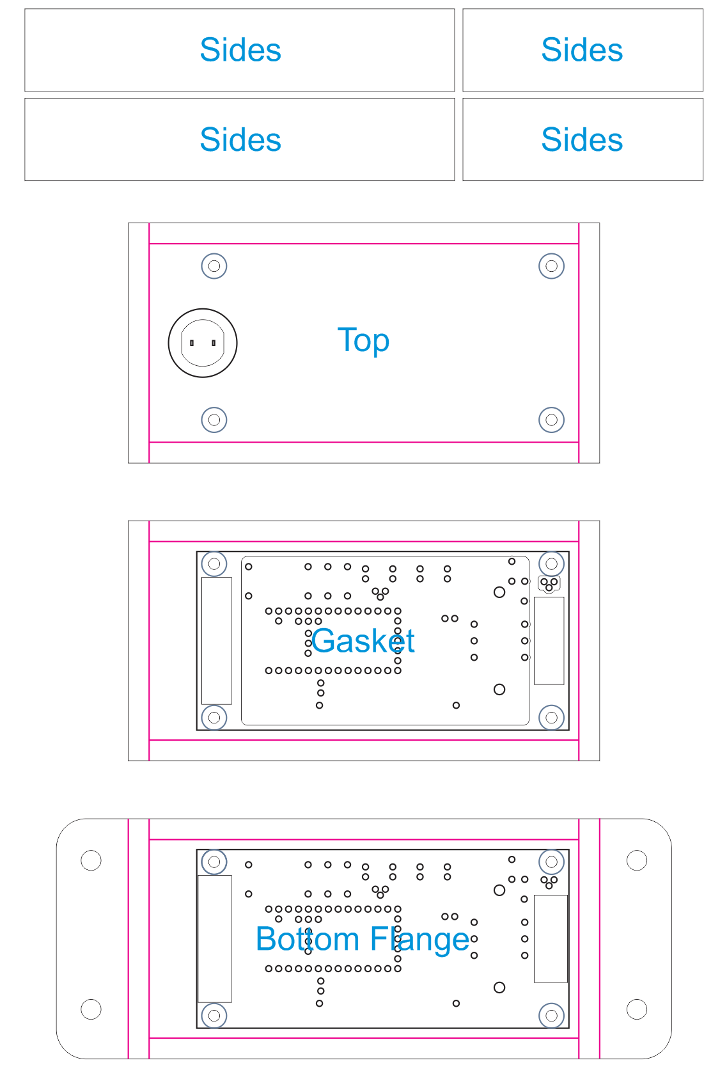
Here is a list of all the materials I used to make these enclosures.
The laser cut design was create with Corel Draw v6. You can find the file flame_sensor.cdr in this Github repository for the code. These were cut with an Epilog laser, which has a driver that ignores the thicker lines when only vector cutting.
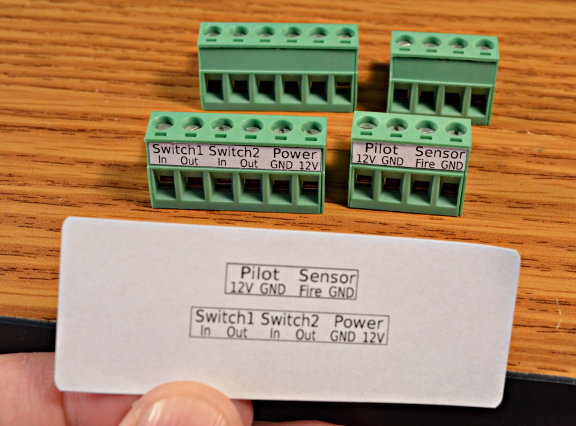
One final addition was printing these labels for the connectors. Troubleshooting electronics in the desert can be frustrating. Hopefully these will help a bit.
With everything built, we did another test with actual fire to make sure it really works. Throughout the latter part of this project I actually became pretty comfortable testing with the diode & resistors, which is very consistent and repeatable. But testing with the actual flame is fun.
Here are the final assembled units, one for each of the Three Wishes, plus a spare.
I’m excited to see the Three Wishes project come together. I hope to update this page later with photos or a link to the project. Photos from first Three Wishes test added below.
If you do use any of this info in your own projects, please think carefully about safety and remember the disclaimer from above.
Three Wishes Art Installation Test (Aug 20, 2017)
Three Wishes photos by Jason Whitson, at Moltensteelman Headquarters, August 21, 2017.
Photo by Jay Bird, at Moltensteelman Headquarters, August 21, 2017.