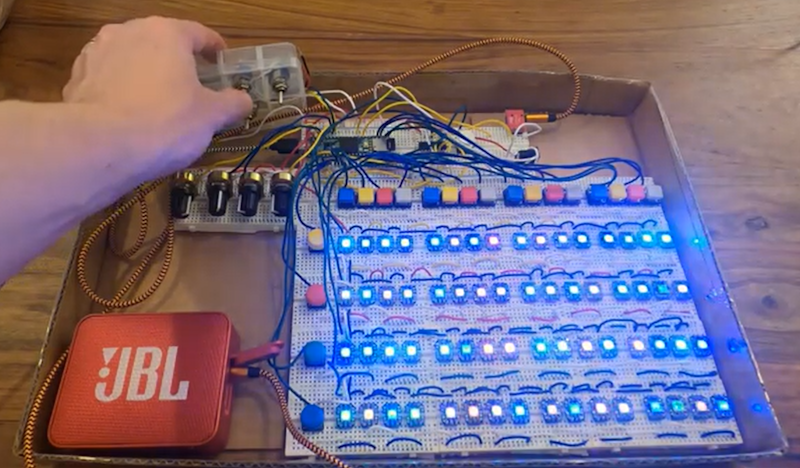
Expensive Notes has been using Novation Launchpad USB Ableton controllers in a novel way, connected to a Teensy 4.1 via USB Host rather than using the intended DAW.

The Launchpad becomes a large 8×8 RGB LED “screen” for the Teensy, as well as an input device, while the Teensy can interface with other devices over MIDI. And in this particular example, rather than sequencing or performing with the Launchpad, notes are controlled by Conway’s Game of Life cellular automata simulation algorithm.
The connected Korg Volca Bass and FM receive notes based on cells dying and being born respectively. The game can also be re-seeded with new cells in order to alter the pattern. MIDI clock is sent to all connected devices to keep everything in sync, including a Volca Drum. Hear the automata in action in the video below!