James Burton has upgraded the micro controller on his impressive openDog robot with a Teensy 3.6.
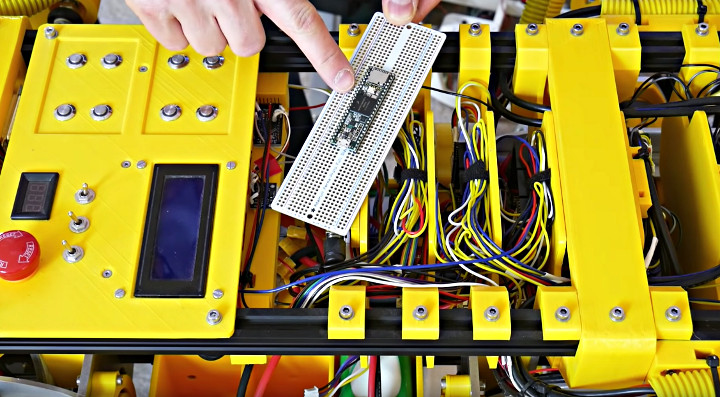
James has been building open Dog, an open source robot inspired by the Boston Dynamics dog robots. He recently upgraded the micro controller to the Teensy 3.6, replacing 3 Arduino MEGAs with it. The Teensy 3.6 provides 6 serial ports, needed for the motor controllers, and allows the code to run in one place, avoiding multiple serial hops.
He’s published a multi part video series on the building of openDog that is well worth checking out.
The project is fully open source with the code published on GitHub.