Sebastian Tomczak has improved his USB MIDI device from 8 gate and 16 CV outputs to 12 gate and 16 CV outputs.
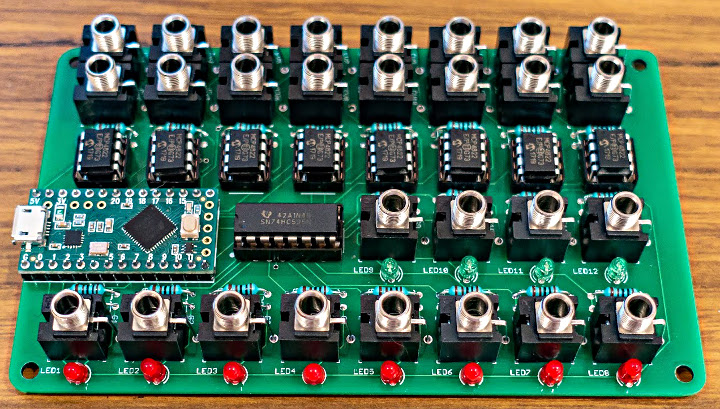
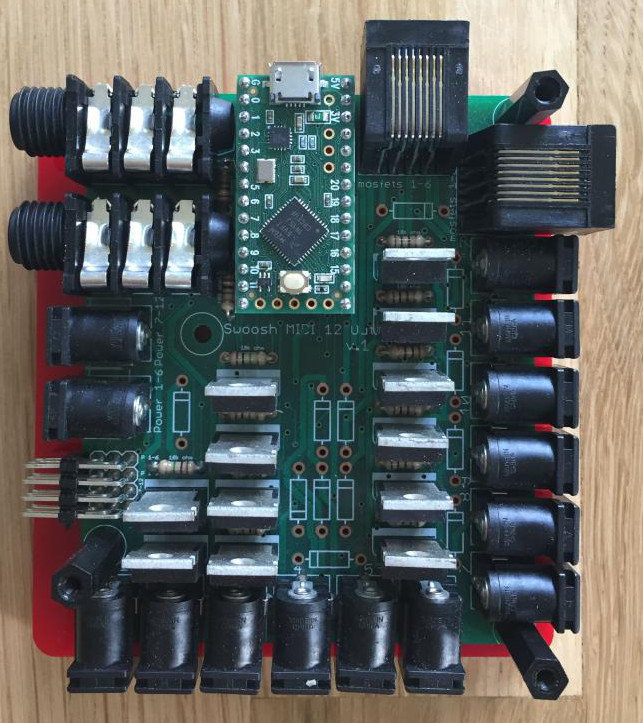
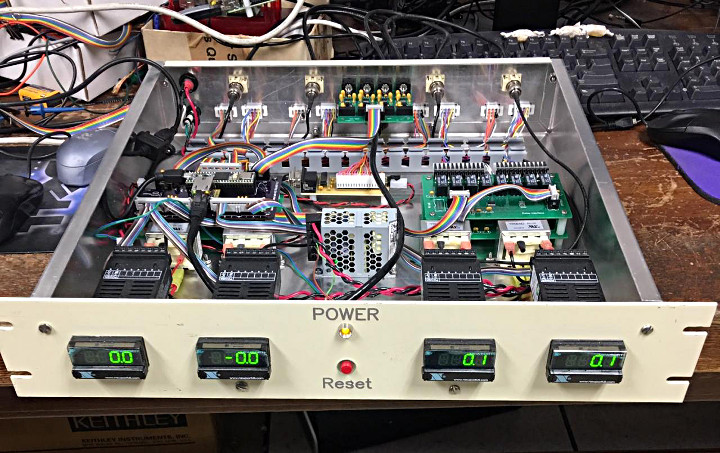
This handy device has 16 control voltage (CV) outputs and 12 gate outputs. USB MIDI channels 1 – 8 are mapped to CV outputs 1 – 16 for pitch and velocity, and gates 1 – 8 for note on and off events. Gates 9 – 12 are mapped to note on and off events only on channel 9, and also will send a sync and transport signal based on MIDI clock messages if received.
This is a new version of of a project we previously covered.
Schematics and a build guide are published on Sebastian’s blog.
Code for the project is available on GitHub.