Scaraman, a PJRC forum user, has shared their progress on a quadruped walking robot project that uses a Teensy 4.
Scaraman wants to make a walking robot that is controlled by a neural network. To achieve that aim, they first had to figure out how to make an ordinary walking robot, the results of which can be seen by watching the video above or by reading Scaraman’s detailed post on the PJRC forum.
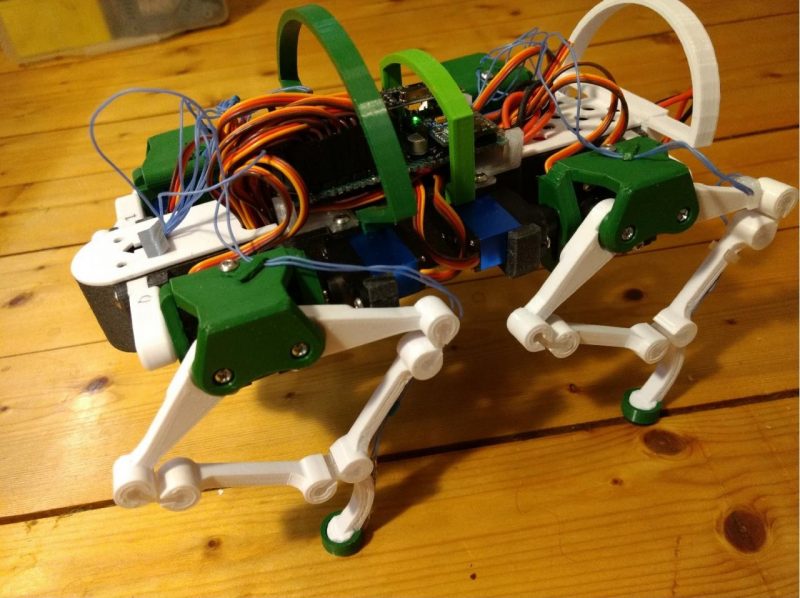
Scaraman explains that they chose Teensy 4 to base this first version of the robot on as it has the computing power to run real time neural networks in future versions of the quadruped. One of the interesting design features of this project are the legs and feet. Scaraman has chosen to use a five bar parallel (also known as a five bar Scara arm) design with an extension. The feet also have sensors in them to provide information to the Teensy about foot placement.
For more videos of the robot in action, including it traversing across an obstacle course and climbing up a staircase made of books, check out Scaraman’s YouTube channel.