The motivations for and outcomes of vaping are myriad, but this project caught our attention as perhaps one of the more unexpected.

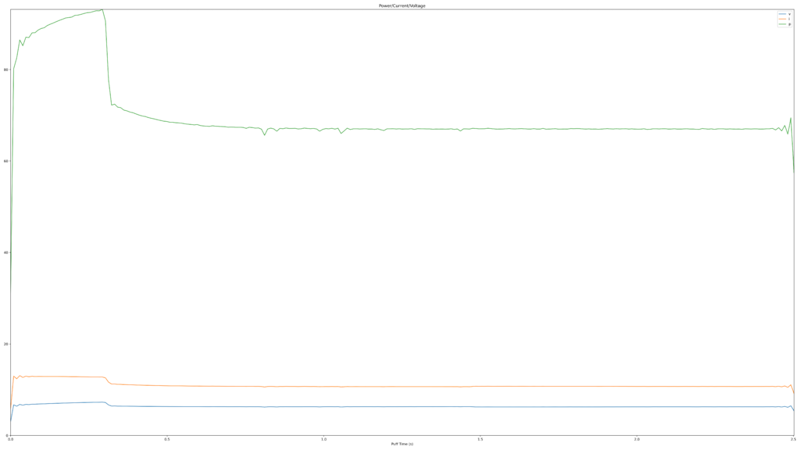
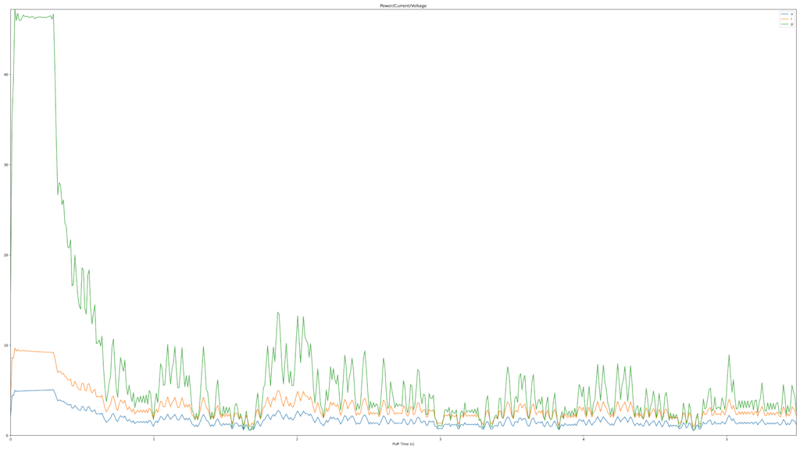
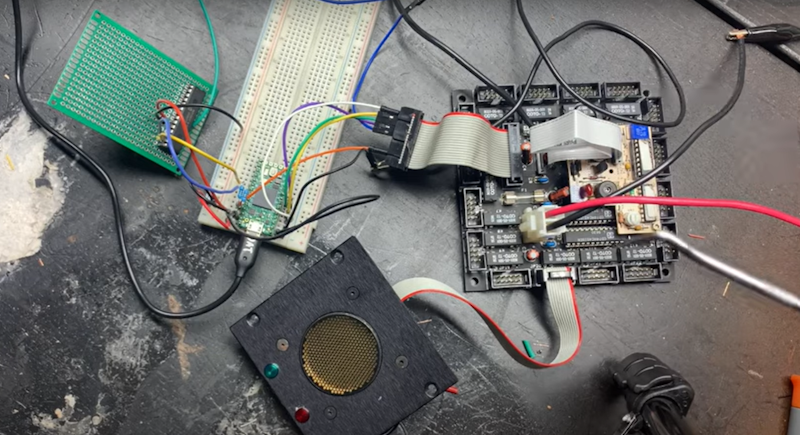
Beginning as GufuGud (Icelandic for “Vapor God”), an open-source software and hardware solution for the measurement of vaporizer atomizer coils, it became apparent that the same data acquisition of precision voltage and current measurement could be applicable to numerous other cases. Using the same Ti INA260 Precision Digital Current and Power Monitor, connected to a Teensy 3.6 via I2C, the PowerProf project collects voltage and current data, serializes it, and sends it to a PC over USB, where it can be analyzed using a collection of Python tools. The INA260 current sensor can handle 0-36V and up to 15A continuous current, with 16-bit 1.25 mA / 1.25 mV resolution. This example output shows a high-end Evolv DNA 100C vaporizer (top) compared to a cheap $20 Chinese box (bottom):