Brian Taylor and the team at Bolder Flight Systems have developed a low -latency, deterministic, scalable flight control system.
Bolder Flight Systems is an spinoff from the University of Minnesota UAS Research labs. They found that at the time the they were working on research, they weren’t really happy with the low-cost options out there so they developed their own primarily to better handle latency and determinism. Their development has evolved from using a MPC-Tiny processor and adding a Teensy 3.2 to using a Teensy 3.6 and BeagleBone Black.
They wanted a system that could scale from simple drones to extremely complex aircraft with a large amounts for sensor and actuator I/O. Their efforts have lead to a scalable system to a virtually unlimited number of sensor and actuators while maintaining determinism and a constant, well defined latency.
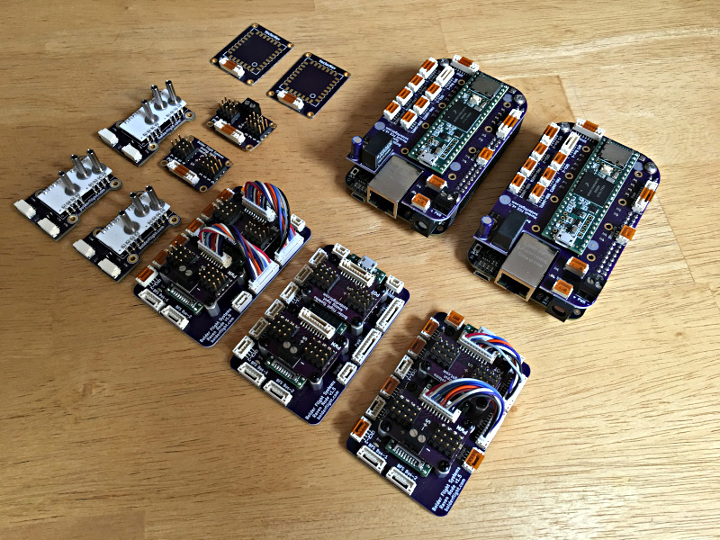
Technical details (as well as purchasing details) can be found over at Bolder Flight Systems. They have also developed a series of Teensy shields, or Backpacks to allow you to easily add different modules to your Teensy. Low level drivers for for all their sensors are available on GitHub.