Curtis Olson has developed a low cost DIY autopilot system that supports the AuraUAS autopilot flight code and firmware.
This version of the hardware is the latest in his continuing evolution of a DIY autopilot system. Each version has had improvements in both performance and features. In the latest version Curtis switched to using KiCad for the PCB layout to gain more flexibility in ordering PCBs.
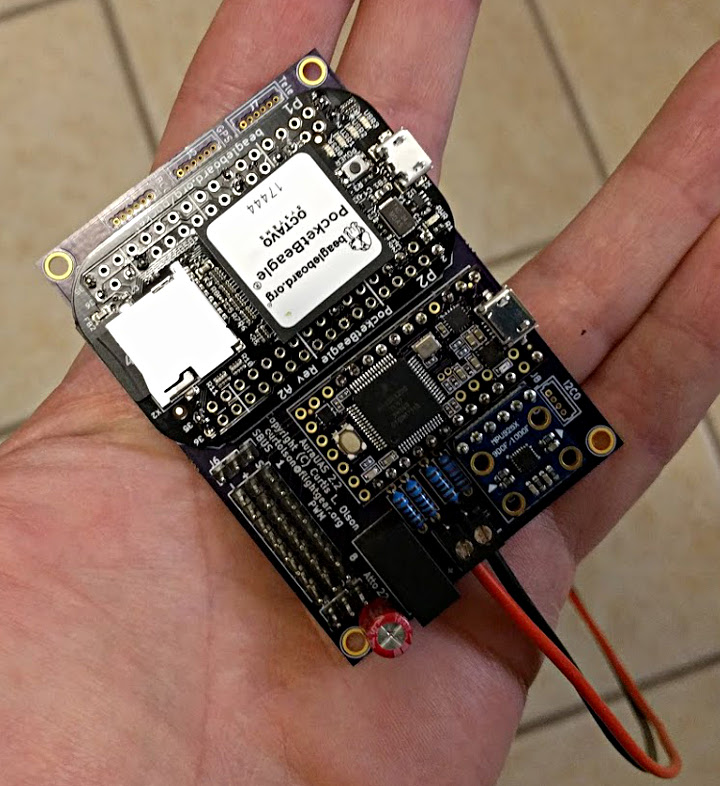
The basic design of the system uses a “little” (Teensy 3.2) and “big” (PocketBeagle) working together as a distributed system. The Teensy handles all the hard real time sensor I/O tasks while the PocketBeagle does the heavy lifting – control, navigation, logging, etc.
Be sure to check out the Github page for the project for more details as well as code, PCBs files, and build instructions.