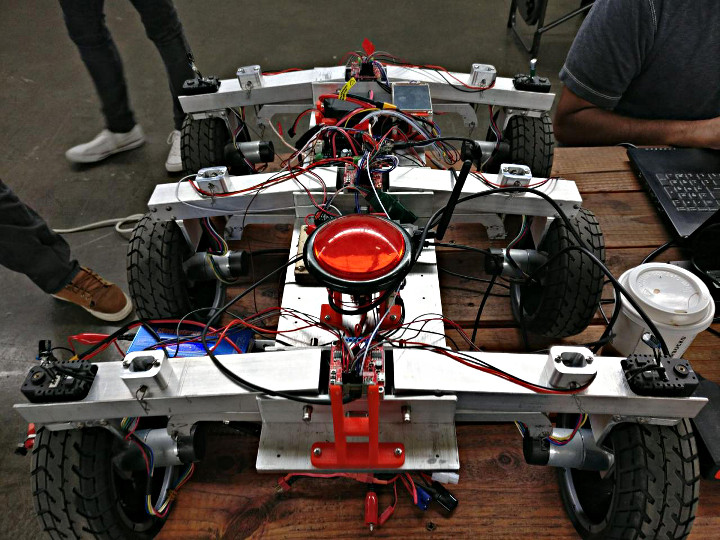
Jon Watte (jwatte on the forum) built an autonomously navigating rover. This awesome rover is built for the outdoors and has individual steering on the 4 corner wheels. Not only can this impressive rover follow a track, but it can climb up stairs as well!
Jon took it to a race early this month and placed 2nd out of 20! Way to go!
Here’s a training pass video showing the rover following a track.
And another video showing the rover climbing stairs.
The code for the project is available on GitHub