PJRC forum member Nick Culbertson, who you may recall from the (“world’s smallest?”) Mini MIDI Controller project, is back with more Teensy-based synth goodness, this time in the much larger, cigar-box-sixed Teensy Arcade Synth.

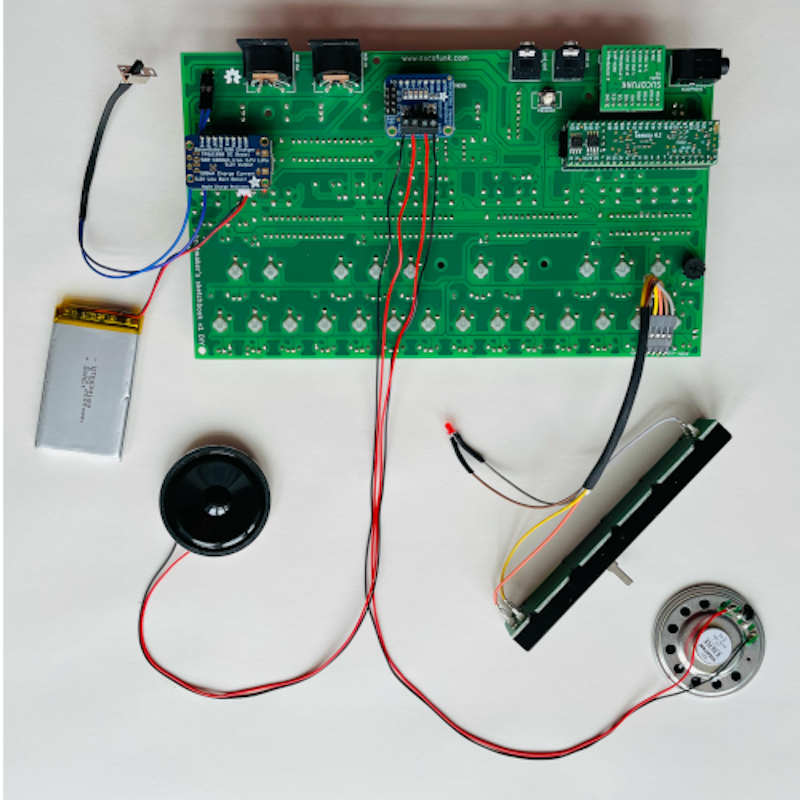
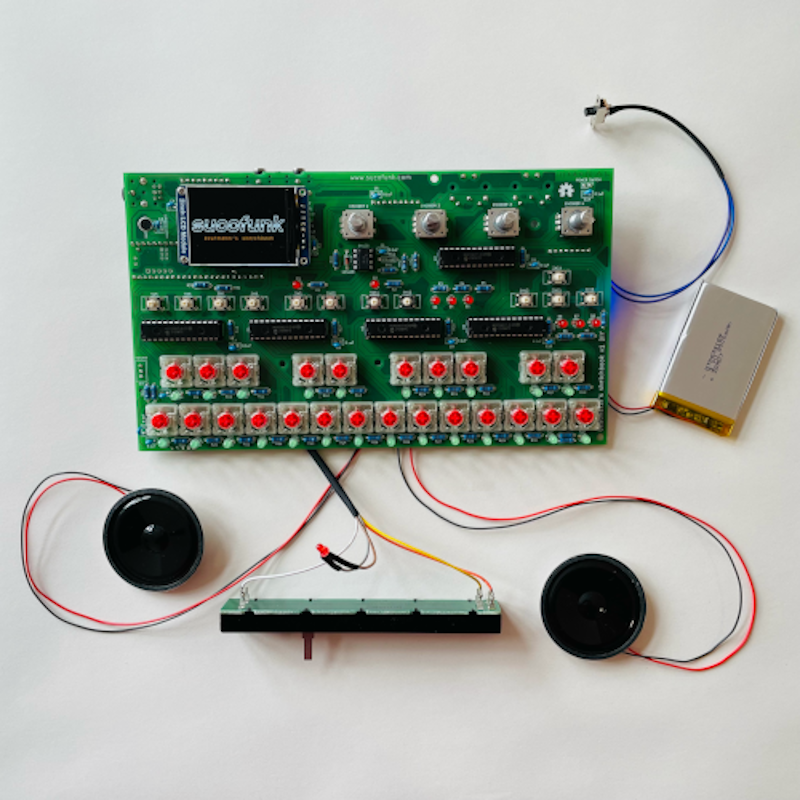
Built around the Teensy 4.0 and Audio Adaptor Board, the project incorporates a rotary encoder and LCD display for selecting parameters, and the eponymous eight 30mm arcade buttons to mash out three-layer polyphonic jams. The Teensy Audio Library was used to do all of the heavy DSP lifting, leaving the GUI and parameter implementation as the “hardest” part. Code and wiring details are available on GitHub, and an excellent tutorial and demo can be enjoyed in the video below.