Researchers from Prof. Joohyung Kim’s KIMLAB (Kinetic Intelligent Machine LAB) at the University of Illinois Urbana-Champaign (UIUC) have developed a low-cost, easy-to-reproduce “pneumatic skin” that gives robots a sense of touch.
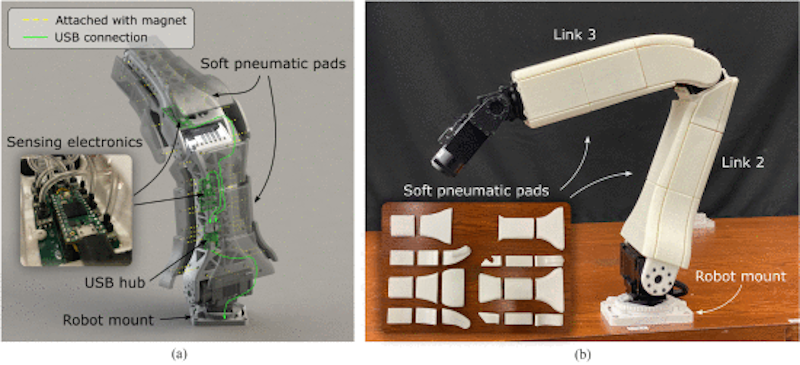
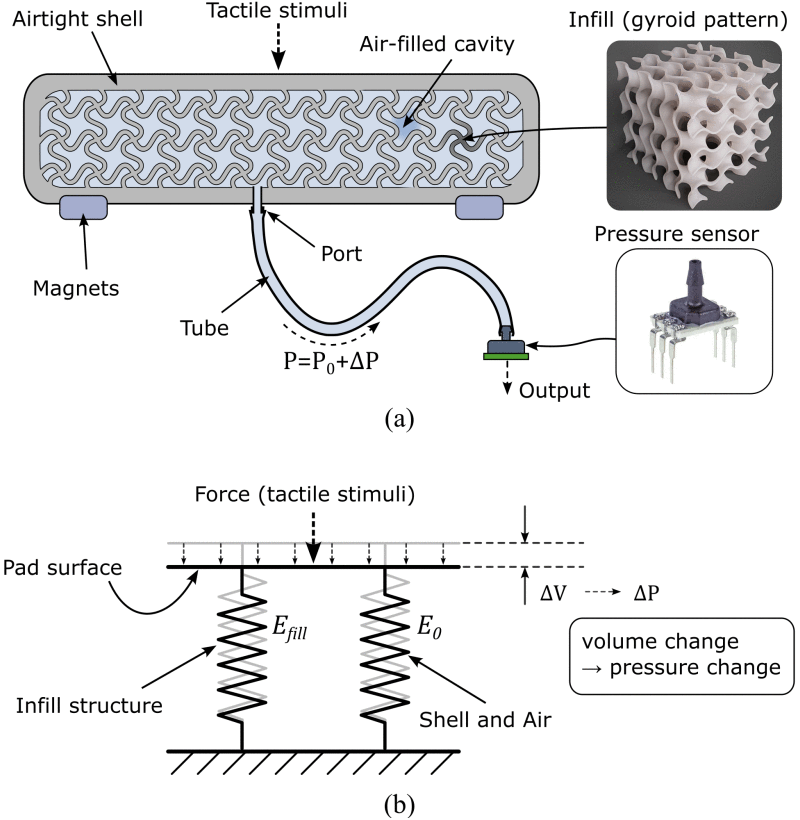
The solution consists of a 3d-printed TPU structure, attached to the robot arm with magnets. Eleven of these pneumatic pads, each coupled with a Honeywell ABPDANT005 pressure sensor, are connected to a PCB. The PCB is in turn connected to a USB hub, which interfaces with a Teensy 4.0. The video below demonstrates the system in action, including detecting a human arm caught in the robot’s elbow joint, which halts operation.